【icROBOSim 2021 新機能】
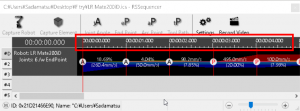
シミュレーションの指定時間位置でIRONCAD画面をキャプチャすることができます。
キャプチャしたファイルは、png形式で開いているicsファイルと同じ場所に保存されます。
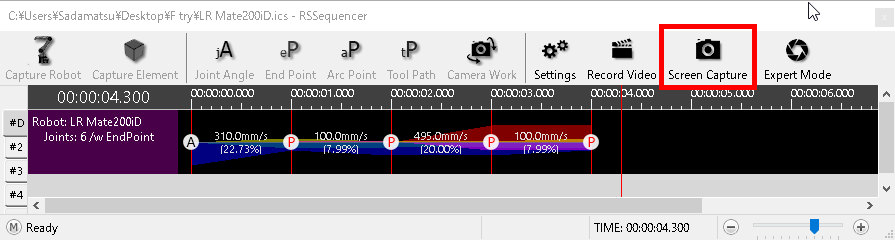
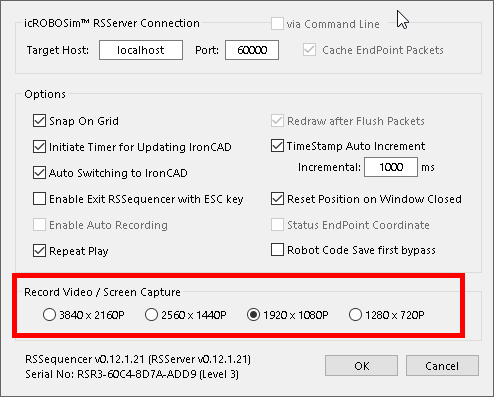
キャプチャサイズは RSSequencer の Settings のRecord Video / Screen Capture 設定になります。
ICIR01-018-21-B
シミュレーションの指定時間位置でIRONCAD画面をキャプチャすることができます。
キャプチャしたファイルは、png形式で開いているicsファイルと同じ場所に保存されます。
キャプチャサイズは RSSequencer の Settings のRecord Video / Screen Capture 設定になります。
ICIR01-018-21-B
IRONCADの設計画面の状態はシーンブラウザ、カタログブラウザ、リボンバーが表示されています。
icROBOSimでシミュレーション作成する際に、モデリングが必要ない場合はそれらをすべて非表示する
ことで画面を広く使用することができます。
それぞれ個別に非表示したい場合はIRONCADの機能で実施してください。
ICIR01-017-21-B
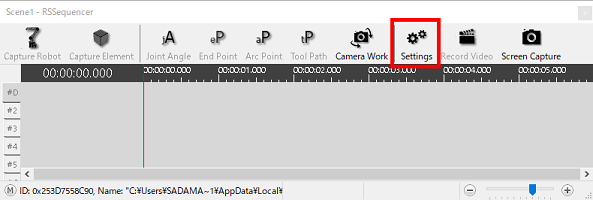
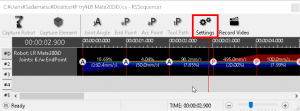
初期設定では、RSSequencerを閉じると0秒地点の姿勢に戻ります。
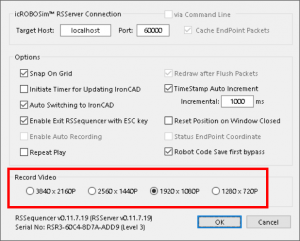
赤いタイムラインの位置を保持したままRSSequencerを閉じる場合は、Settingsを変更します。
「Reset Position on Window Closed」のチェックを外します。
RSSequencerを閉じた場合、赤いタイムラインの位置が保持されます。
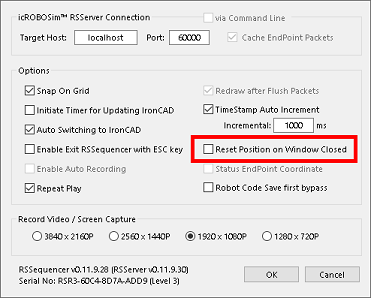
再度チェックを入れると、RSSequencerを閉じた場合に0秒地点にリセットされるようになります。
構想検討フェーズや仕様変更が発生した場合、シミュレーションを作成した後にロボットの配置変更をしたい状況があります。 これまでは、ロボットデータ移動後にすべての既存イベントを再登録する必要がありました。
この新機能により、ロボットの配置だけを変更したい場合、先端治具の既存イベント位置を変えることなく ロボット位置を変更することができ、よりスピーディーに検討を進めることが可能となります。
ICIR01-015-21-B
シリアルナンバーを新しいナンバーに変更する場合やご使用されたいPCを変更する場合は
使用中のPCからシリアルナンバーをエクスポートする必要があります。
①アクティベーション画面でシリアル番号が入力されていることを確認します。
②「Deactivate」ボタンをクリックします。
③正常にエクスポートされた場合、「successfully」の文字列が表示されます。
④デスクトップ上に一部シリアル番号の付いたテキストファイルが作成されます。
⑤削除して終了
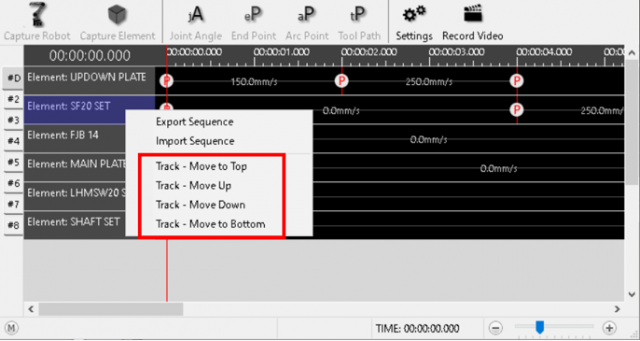
登録 (Capture) したトラックの順番を任意の場所に変更できます。
シミュレーション作成時の登録順番などを気にせず、作業効率を向上できます。
Capture したトラック名を右クリックし、設定します。
・Move to Top :一番上に移動します。
・Move Up Down :一つ上に移動します。
・Move Down :一つ下に移動します。
・Move to Bottom :一番下に移動します。
ICIR01-020-21-B
登録したイベントへコメントを入れることができます。
Joint Angle , End point , Arc Point の登録イベント上で右クリックします。
Edit Comment を押下します。
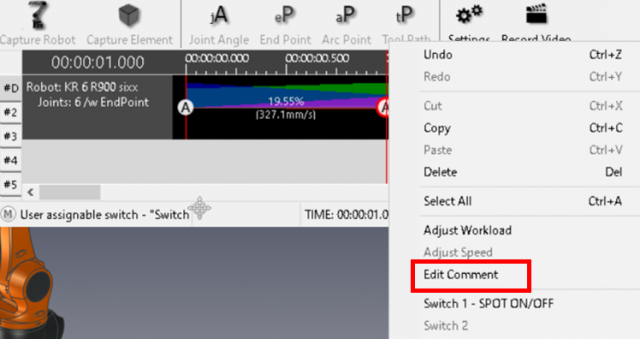
Comment ダイアログにキーボード入力します。
Enter キーで改行してコメントを記入できます。
文字数や改行数に制限はありません。
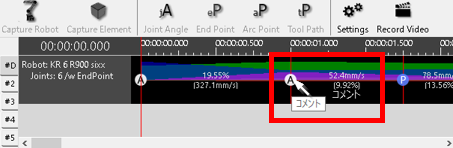
以下に表示されます。
・マウスカーソルをイベント上に移動して表示 ※すべて表示されます。
・登録イベント間の下側に表示 ※文字入力数が多い場合は、途中で表示が切れます。
タイムラインの時間軸をその時々で見やすいスケールに変更できます。
Crtlキーを押しながらマウスのセンターホイールで調整します。
ICIR01-005-19-B
リンク機構やエアシリンダー機構を用いた装置の動作検証をする場合
シーンブラウザの同じアセンブリ内のパーツまたはアセンブリに配置拘束を設定し、動かしたいパーツ名の最後に「_cSolve」を追加することで配置拘束された装置を動作させることができます。
※大文字・小文字も完全一致となりますので、お間違えの無いよう入力してください。
異なるアセンブリにパーツが配置されている場合は、拘束した通りの動きを再現できませんのでご注意ください。
スペースキーで途中停止、Escキーで途中終了します。 動画の途中で回転や拡大縮小することも可能です。
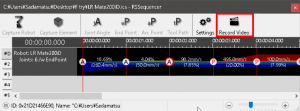
※始めにIRONCADのファイルが保存されていることをご確認ください。
保存されていない場合「Record Video」のボタンが有効になりません。
動画はシミュレーションに使用したIRONCADファイルと同じフォルダ内にMp4形式で保存されます。
解像度の変更:Settings の Record Video で設定可能
ご使用モニターにあった解像度で記録できます。
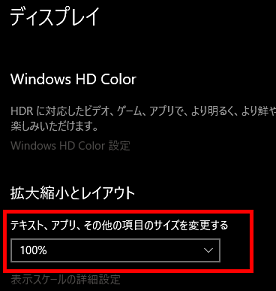
ディスプレイ設定の解像度( 3840 × 2160)では、表示スケールを100%に設定してください。 125%以上に設定されている場合、icROBOSim > Setting の Record Videoの設定が、自動的に下がります。
icROBOSimシミュレーション時に干渉チェックをしたい場合は、IRONCAD の標準機能(メカニズムモード)を併用して実施します。 すべての部品を選択すると処理が重く、動作も遅くなります。 大規模アセンブリの場合、小ユニット単位で確認する対象に対してのみ干渉チェックされることをお勧めします。
干渉チェックの際はマウス操作をあまり速く動かさないようにしてください。 動作が速すぎると干渉検出できません。
直動や回転機構のみ (Capture Element のみ) で構成されたデータを icROBOSim でシミュレーションする場合、
IRONCAD標準機能のメカニズムモードを使用しても干渉が検出できません。
その場合は、ダミーのロボットデータを画面上にドロップして、RSSequencer に Capture Robot 登録してください。
RSSequencer に登録後はロボットデータを抑制(非表示)することで影響なく、メカニズムモードの干渉チェック機能を有効にできます。
作成したイベントで、ワークデータ等を時系列に合わせて簡単に表示/非表示することができます。 開始ポイントを右クリックして「Hide Element」 を選択します。 再度表示させたい場合も同様の操作で可能です。
イベント時間はモーター負荷率(Workload)や動作速度(Speed)で設定することができます。
ICIR01-009-20-B
シミュレーションを作成した後に記録したポイントの部分(複数)選択や全点選択する方法をご紹介します。
ICIR01-006-20-B
シミュレーションで作成したポイントの動作時間を変更したい場合はShiftキーとマウスの左クリックで簡単に変更することができます。
ICIR01-010-20-B
icROBOSim はSimple(シンプル) ・ Easy(簡単) ・ Fast(速い) を兼ね備えたシミュレーションツールです。
Windows準拠のマウス操作で簡単に記録したポイントの位置変更や動作時間の編集が可能です。
ICIR01-007-20-B
icROBOSim はSimple(シンプル) ・ Easy(簡単) ・ Fast(速い) を兼ね備えたシミュレーションツールです。
起動は「RSSequencer」を起動するだけでOK!
ICIR01-016-20-B
icROBOSim™ でロボットシミュレーションする際に外部や個別に設計されましたマテハンパーツをロボットの先端に配置する方法をご案内します。弊社が提供するロボットデータのアセンブリデータには EndPoint というサブアセンブリが存在します。そのサブアセンブリの中に使用されたいマテハンデータを移動してください。拘束は使用せず、Triball で配置するだけで簡単に設定可能です。