icROBOSim™ – Robotic Simulation for IronCAD
icROBOSim™ redefines the field of robotic simulation by seamlessly integrating with IronCAD, providing users with a simple yet robust UI designed to revolutionize the motion planning and composition process, challenging traditional control paradigms and expanding its capabilities to transcend mere robotic simulation, ultimately enabling a comprehensive and innovative simulation of diverse objects and elements within the CAD environment to unlock endless creative possibilities in design workflows.
“An IronCAD robotic simulation plugin that transforms CAD into a streamlined, efficient, and user-friendly digital verification platform. It redefines robotic simulation by introducing time-domain-driven capabilities, protected under Patents 特許第 6598454 号.”
By directly integrating 3D solid modeling objects, icROBOSim™ enables the seamless visual construction, design, and simulation of workflows within the CAD environment, aligning perfectly with conceptual virtual designs. Not only can robots be activated, but all objects created within the scene become integral to the simulation. icROBOSim™ serves as a rapid conceptual simulation tool to assess the initial impact of a workflow while also excelling in detailed workflow discussions, ultimately bridging the gap to seamlessly drive real-world robotics.
“icROBOSim™ – Design with ease and simulate instantly. It serves as a rapid conceptual simulation tool to assess the initial impact of motion planning workflows, while also excelling in precise, detailed workflow discussions.”
“icROBOSim™ – A computer-aided robotic simulation system that utilizes 3D solid modeling to virtually design and build simulation workflows as envisioned. It serves both as a rapid conceptual simulator to evaluate the initial impact of motion planning and as a tool for detailed workflow analysis to ensure precision in design.”
Standout features of icROBOSim™ :
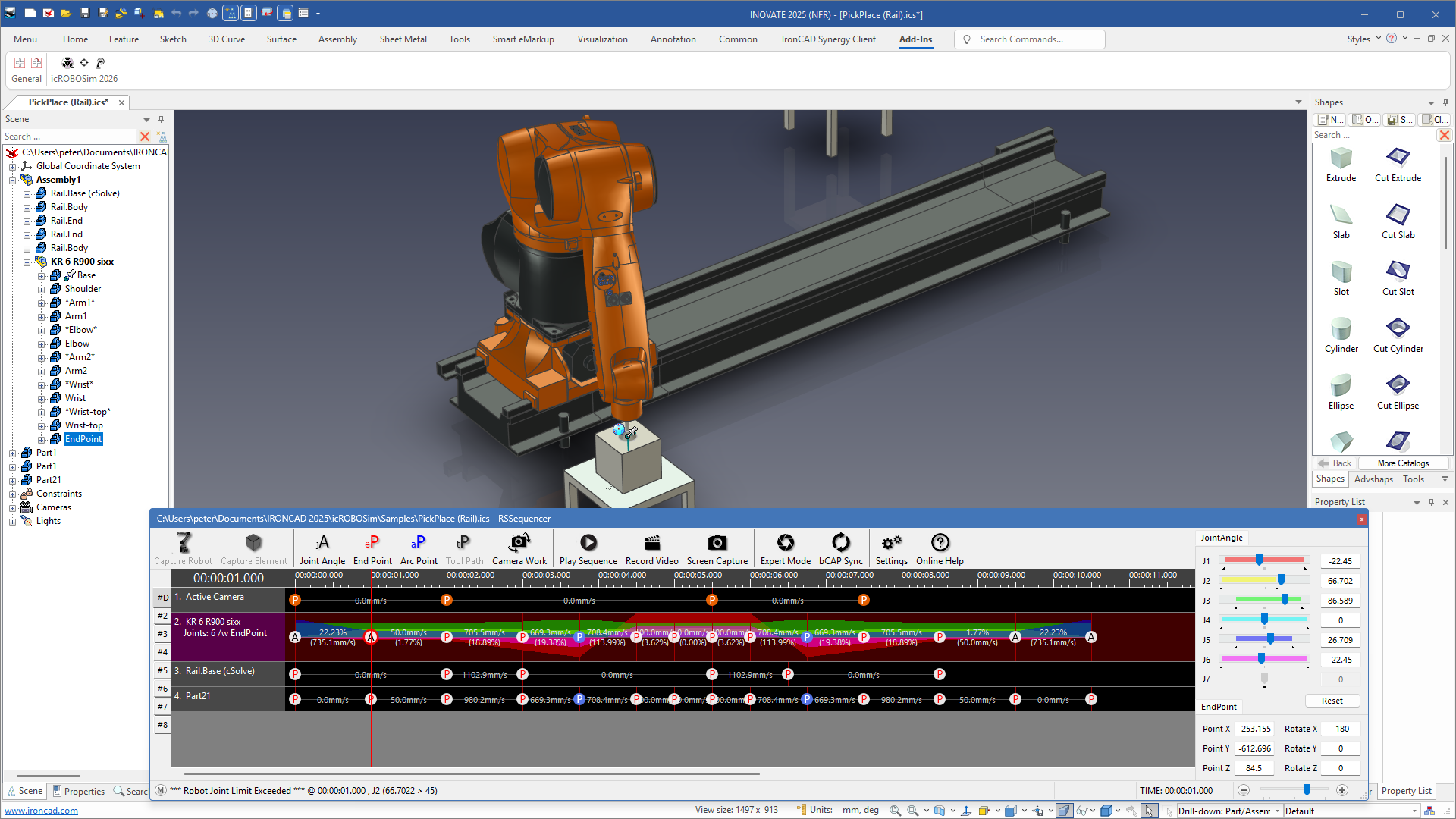
- 3D Solid Modeling Integration – Build and simulate workflows virtually right inside CAD software.
- Quick Conceptual Simulation – Evaluate the early impact of workflow planning efficiently.
- Detailed Workflow Analysis – Support precise and intricate workflow discussions.
- Multi-Robot Simulation – Seamlessly simulate robots from multiple manufacturers in a single environment.
- Collision Detection – Identify and address robot interference during simulation.
- Offline Teaching – Allow for offline programming and adjustments before implementation.
- Time-Domain Control – Perform high-accuracy testing based on timeline-specific movements.
- Direct Export – DENSO, FANUC, NACHI, YASKAWA
Peter Sun – Developer, IP and Patent Holder